Jakub Uhlík
Jakub Uhlík



Display, edit, filter, render, convert, generate and export colored point cloud files.
Key Features:
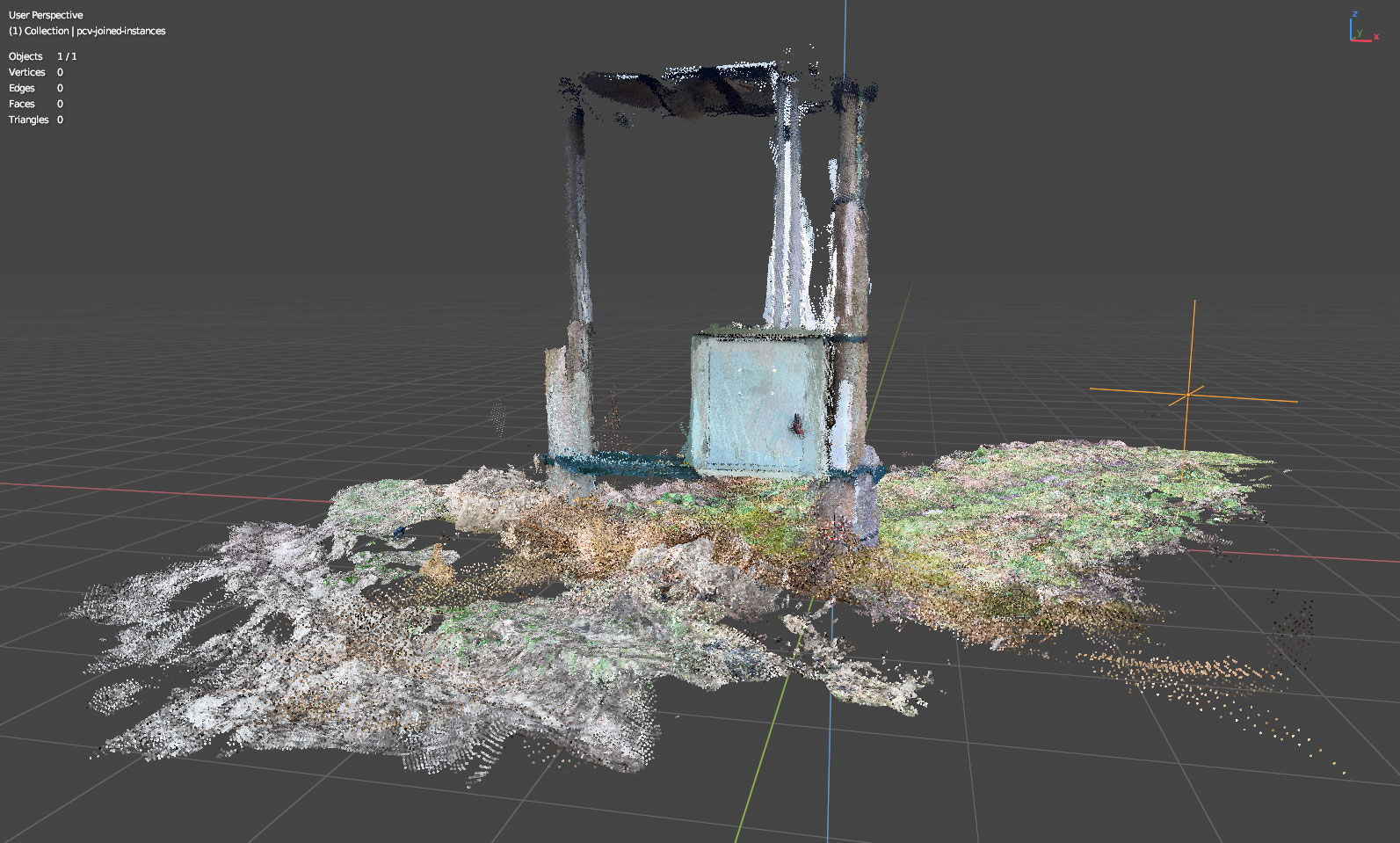
- Display hundreds of millions of colored points in 3d viewport, limited only by system and gpu memory.
- Any Blender object can be used as container for points, points are not part of Blender data (until converted to) for maximal performance.
- Supported file formats - read: PLY, LAS/LAZ, E57, PCD, any text based file format such as PTS, XYZ, TXT, CSV etc., write: PLY, LAS/LAZ, E57 and PTS.
- Custom PLY reader/writer optimized for point data and performance.
- Supports loading/editing/writing of 3D Gaussian Splatting PLY files, can reconstruct points colors from spherical harmonics and convert to Blender mesh that can be rendered in Cycles engine approximating 3DGS effect.
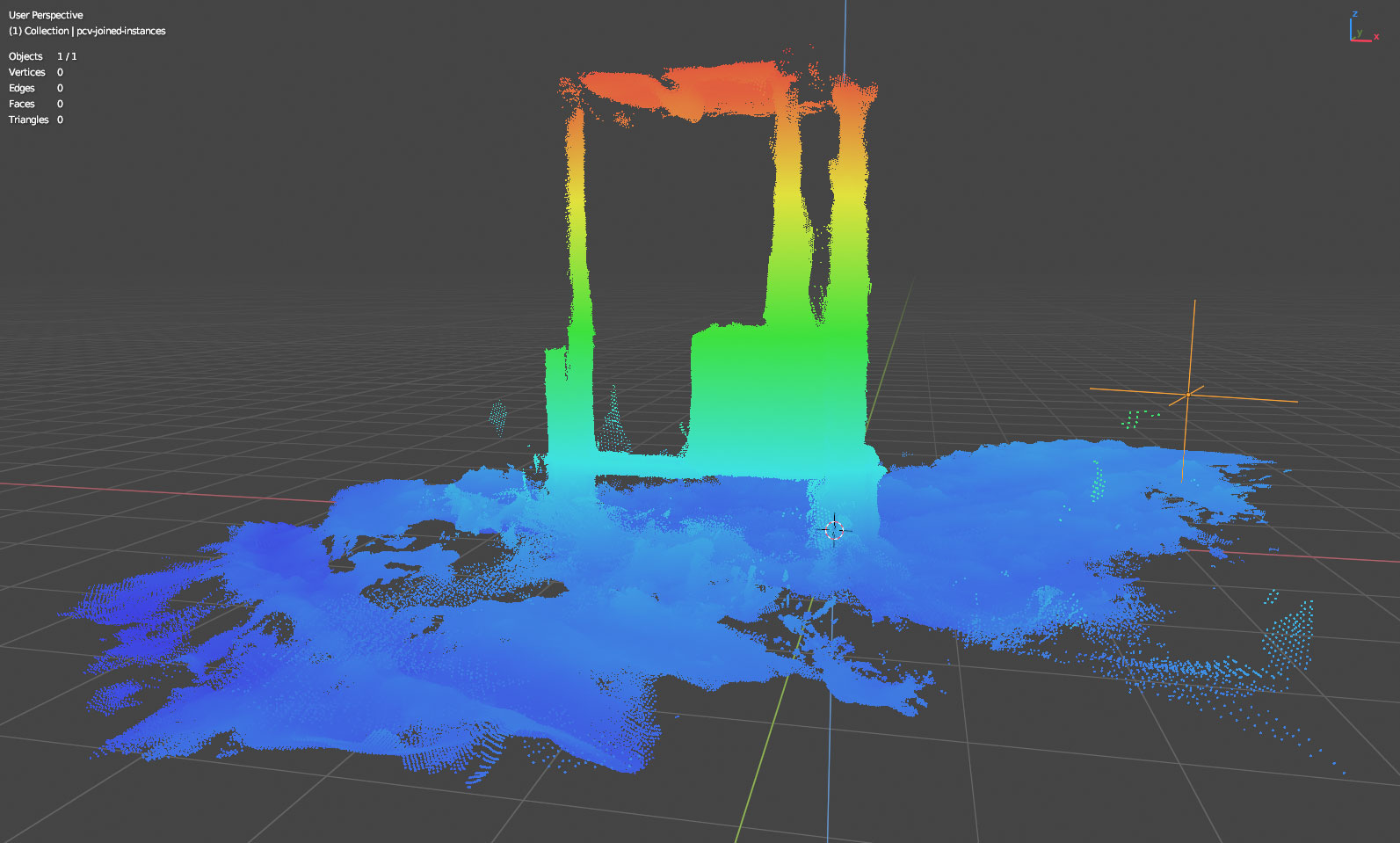
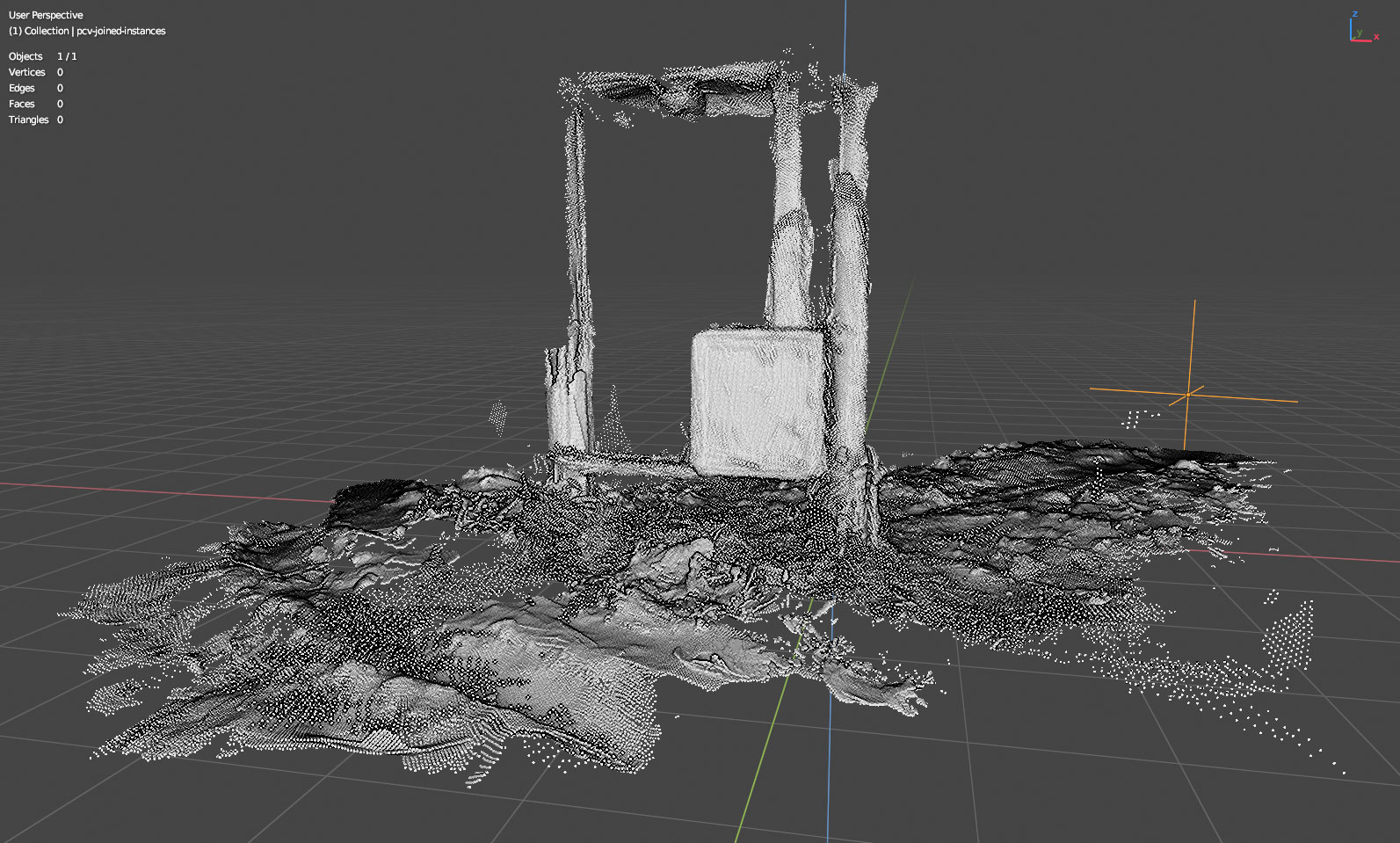
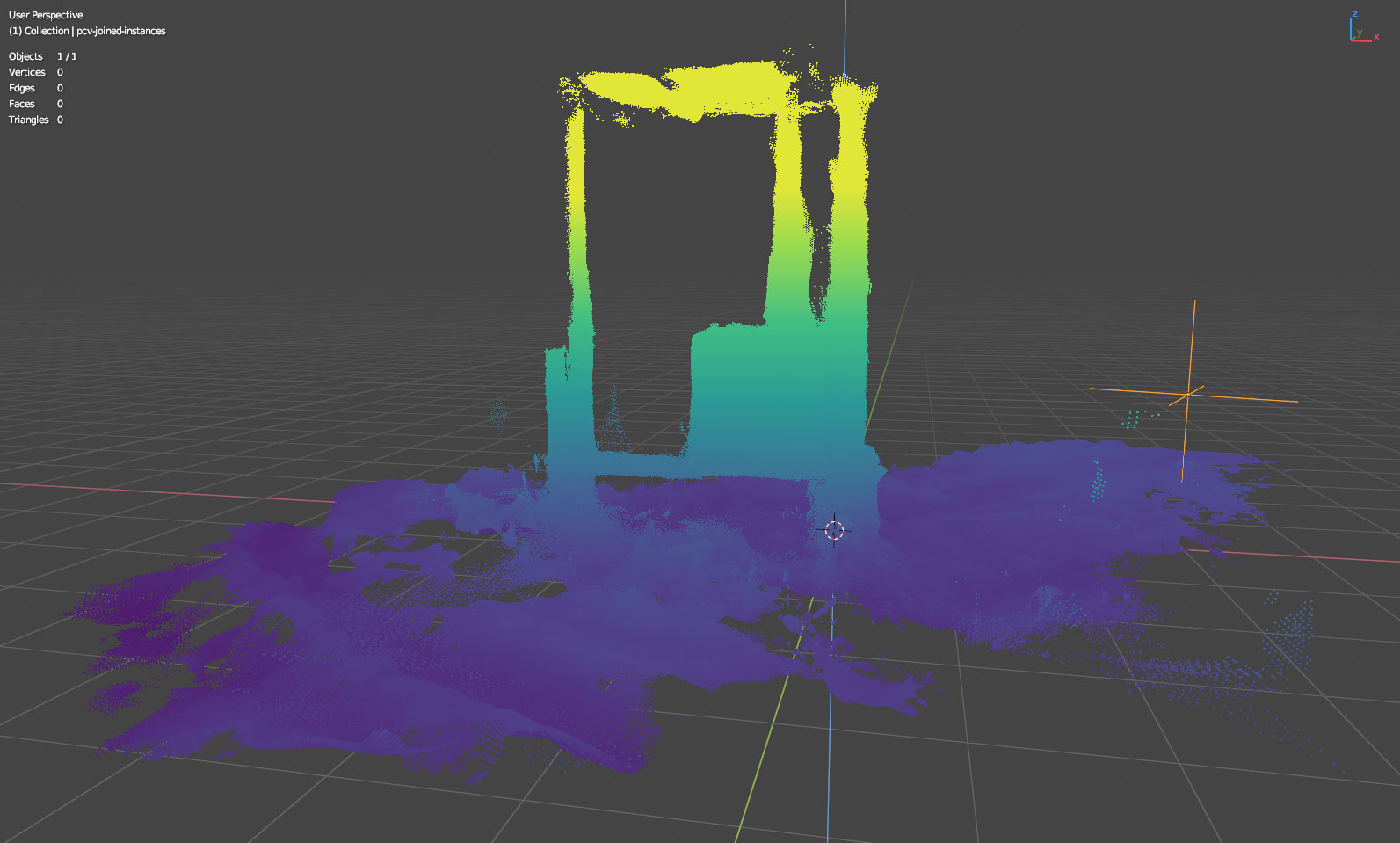
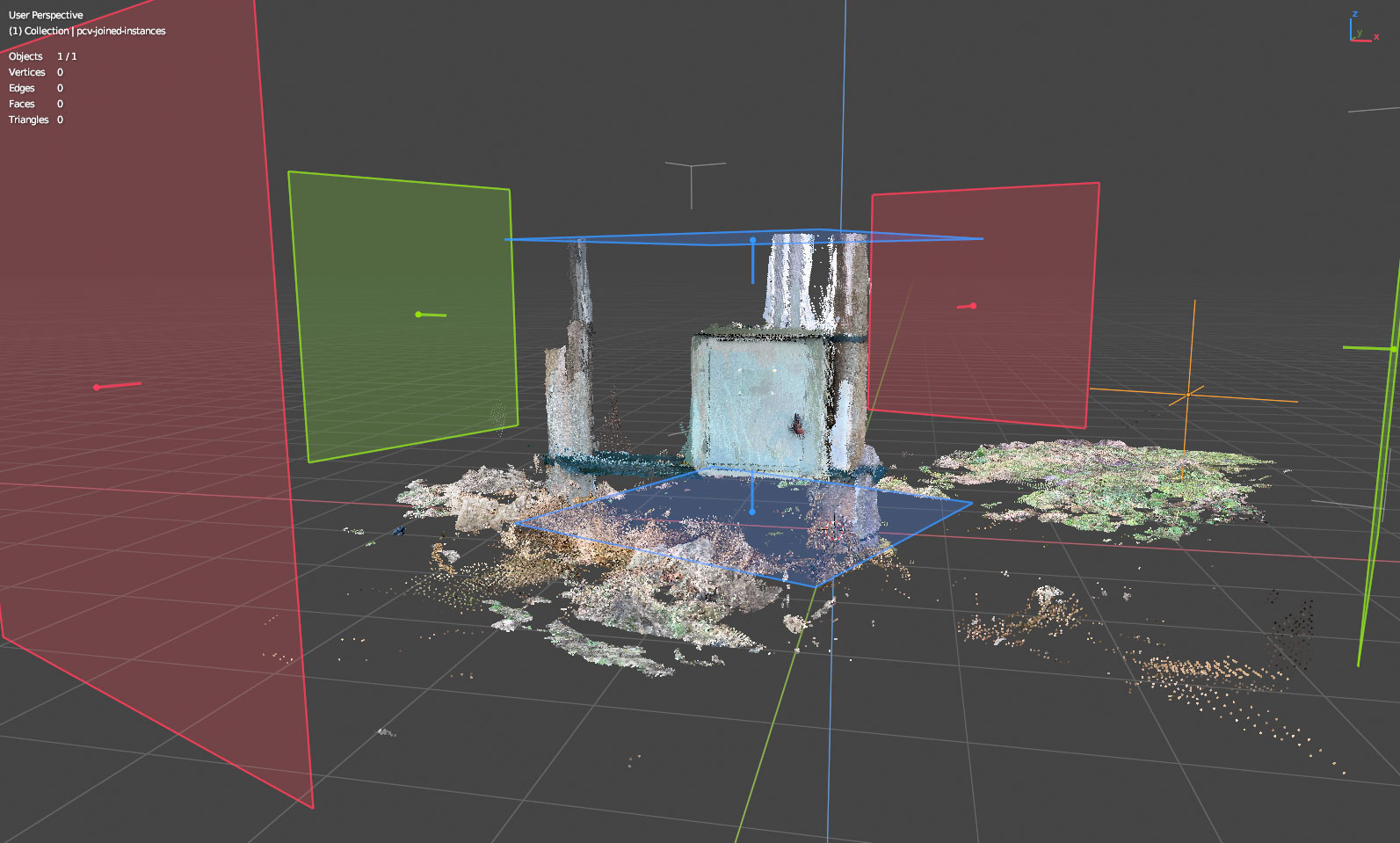
- Display points with many shading options that can be mixed together, display points with analytic shaders, display point normals, use clipping planes, display scalar values (value remapping in range, color schemes).
-
Fast Navigation option that draws subsampled points into 3d viewport while is being navigated for smooth working with very large datasets.
- Cleanup points directly with modal selection tools or by using Blender edit mode with temporary mesh linked with points using Blender tools.
- Mesh Retopology tools that utilize vertices snapping to points and mesh drawn with custom shaders over points.
- Clip Planes modal tool to interact with clipping planes visually, store/restore clip planes named states.
- Abundance of editing filters: subsample/voxelize/slice points, crop, boolean, join, split, color adjustment, remove by color or value, project on mesh, remove duplicates, estimate normals, point set registration, surface reconstruction and many more.
- Builtin gpu rendering to image or images sequence with viewport or transparent background.
- Convert points to various Blender mesh (and vdb volume) data for use with Geometry Nodes and rendering with any render engine while preserving all loaded scalar fields and normals.
- Generate point clouds from mesh surface, mesh volume, Geometry Nodes vertices with attributes and generate point clouds from whole scene by simulating lidar scanner or photogrametry.
- Working with PLY sequences, playback, batch convert, filter and export. Sequence can also be generated from mesh or scene.
- Can be used as debugging tool to display 3d location/normal/color data with easy to use python api.
- Extension, all libraries bundled, supported platforms Windows (x64), Linux (x64) and macOS (arm64 & x64)
PCV 3 full documentation here: Point Cloud Visualizer 3.1 Documentation (WIP)
PCV 2.x full documentation here: Point Cloud Visualizer - documentation (Relatively compatible with PCV 3)
Please see FAQ section for answers to common questions
More questions? Want a feature to be implemented? blenderartists or sidebar on right - "Ask a Question" button
Bunch of images from documentation..